IEEE ICRA 2021
Self-Supervised Data Labeling via Simulation for Multi-Agent Planning
We generate training labels automatically from simulated collision events, distill them into spatial regression models, and use the learned regions to build roadmaps that are 5x faster than sampling baselines in dynamic, multi-agent environments.
UIUC Parasol Lab · Google Brain
The Problem
Planning in dynamic environments is slow and fragile.
Multi-agent motion planning is bottlenecked by narrow passages and dynamic obstacles. Traditional roadmaps sample uniformly, wasting nodes in open space and under-sampling critical chokepoints. Labeled data for where collisions actually happen is expensive to collect manually.
Programmatic Data Labeling via Simulation
No manual annotation required.
Instead of hand-labeling, we run thousands of simulated trajectories and automatically extract avoidance-critical regions: locations where agents must deviate to avoid collisions. This generates large-scale, spatially-grounded training labels directly from simulation, a form of self-supervised programmatic data labeling.
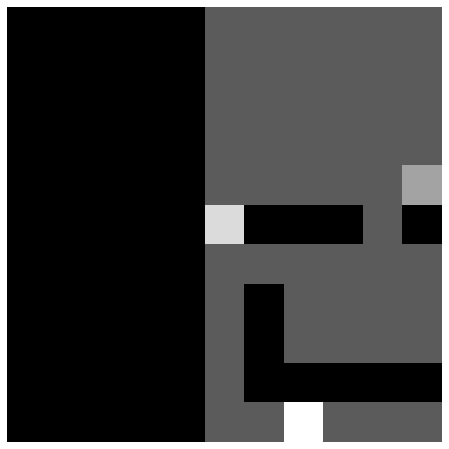
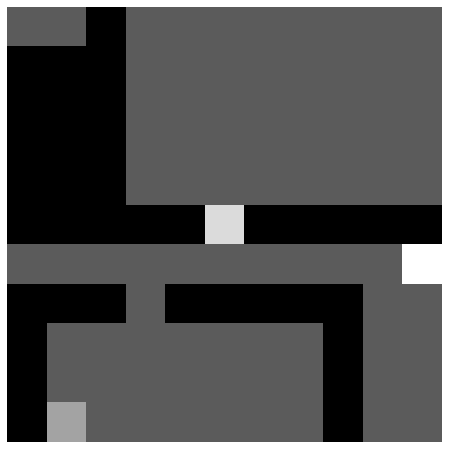

From darkest to lightest: static obstacles, free space, agent origin, avoidance-critical region, and goal region.
Model Distillation
Learn structure, then plan with it.
A spatial regression network is trained on the simulation-generated labels to predict avoidance criticality from local occupancy grids. At planning time, the model scores candidate nodes: concentrating the roadmap in regions that matter. The result: sparser graphs with better coverage of critical areas.
Results: ACPRM vs. Baselines
5x faster. Sparser graphs. Better coverage.
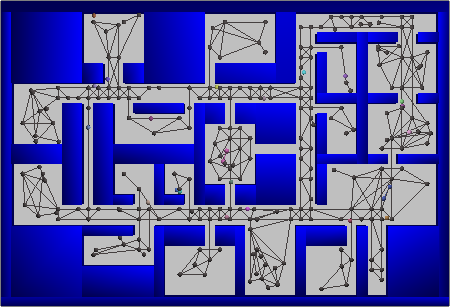
ACPRM: nodes concentrated in critical regions.
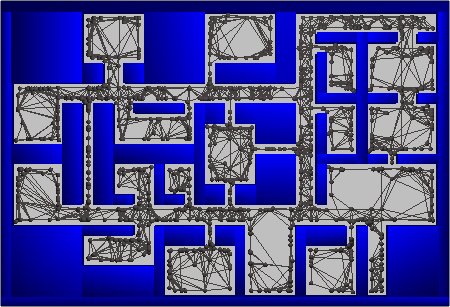
MAPRM baseline: uniform sampling wastes nodes.
Key Takeaways
- 5x speedup over sampling baselines for multi-agent planning.
- Zero manual labels: all training data generated programmatically from simulation.
- Transferable: learned models generalize across environments with similar structure.
- Published at IEEE ICRA 2021, co-authored with Google Brain.